In this blog we recap the Team’s activities after the completion of the 2024 FRC competition season.
After we finished the 2024 FIRST® Robotics Competition (FRC) season in March 2024, the Team took a break. During the break the mentors discussed how to approach the upcoming 2025 season. The mentors decided to build a different robot for the same 2024 FRC Crescendo game play. With the permission of team FRC 9496 LYNK we started with their robot concept design. Over the summer CAD models were developed and when the Fall semester started we proceeded with building the robot.
There were several goals we wanted to accomplish with this build. For the returning students and mentors this was a means to keep their skills sharp. For the new students and mentor that joined this Fall they will became familiar with how the team works and participate in the construction. The new students and mentor can see and experience multiple activities (manufacture, electrical, programming, etc.) and see what areas they are most interested in. We also have the successful first use of the new HAAS CNC machines to manufacture robot components. These new components will provide greater strength and rigidity of the robot base.
So that the new build had specific competition goals the Team entered two competitions scheduled for October and November 2024. The first is the Ra Cha Cha Ruckus in Rochester on October 26th and the New York Tech Valley Robot Rumble on November 2nd.
From September through October the Team has been hard at work building a robot to compete at the Fall 2024 off-season competitions. The two competitions are the Ra Cha Cha Ruckus in Rochester on October 26th and the New York Tech Valley Robot Rumble on November 2nd. The robot is based on the design of FRC 9496 LYNK (with their permission) for the 2024 Crescendo FRC competition. The robot build is a warm-up for the coming 2025 competition season. There are several goals we wanted to accomplish during this build. For the students and mentors returning from the 2024 FRC competition we want to keep their skills sharp. The new student and mentor team members that joined this Fall are to become familiar with how the team works and participate in the construction. The new students and mentor can see and experience multiple activities (manufacture, electrical, programming, etc.) and see what areas they are most interested in. We also have the successful first use of the new HAAS CNC machines to manufacture robot components. These new components will provide greater strength and rigidity of the robot base.
New students being introduced to creating Computer Aided Designs (CAD) drawings that are the basis for creating parts for the robot. We use the Onshape CAD software system that is the standard for the high school. During the competition season it is critical that drawings of parts be done quickly and accurately to support prototyping and ultimately the final manufacturing and testing of the final robot design.

Soldering is a skill that looks simple but there are subtleties involved in getting reliable and clean solder joints. A Mentor is teaching a new student how to solder. With the bashing and collisions that the robots will experience during competition having solid joints is critical to finishing all the matches.

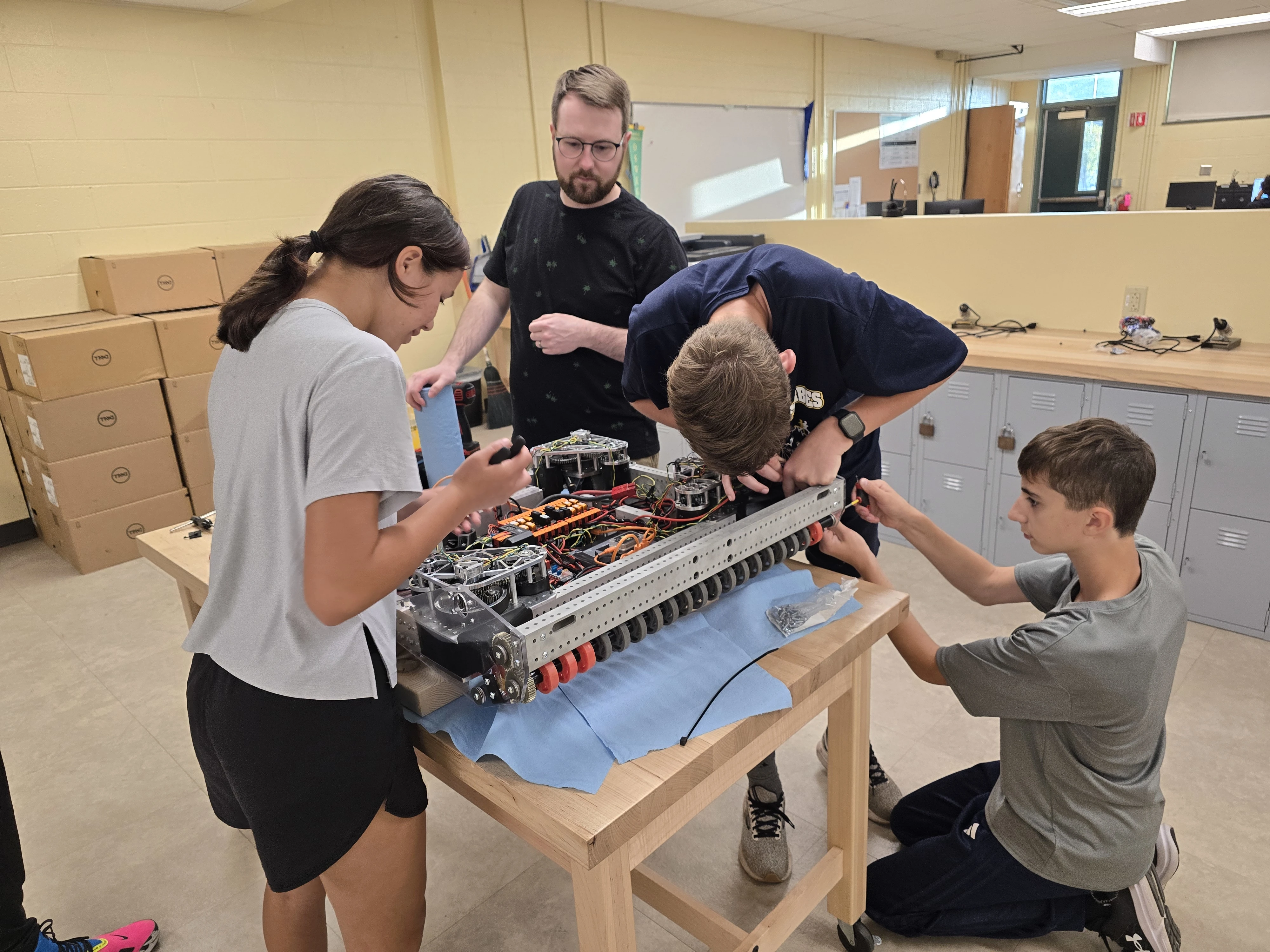
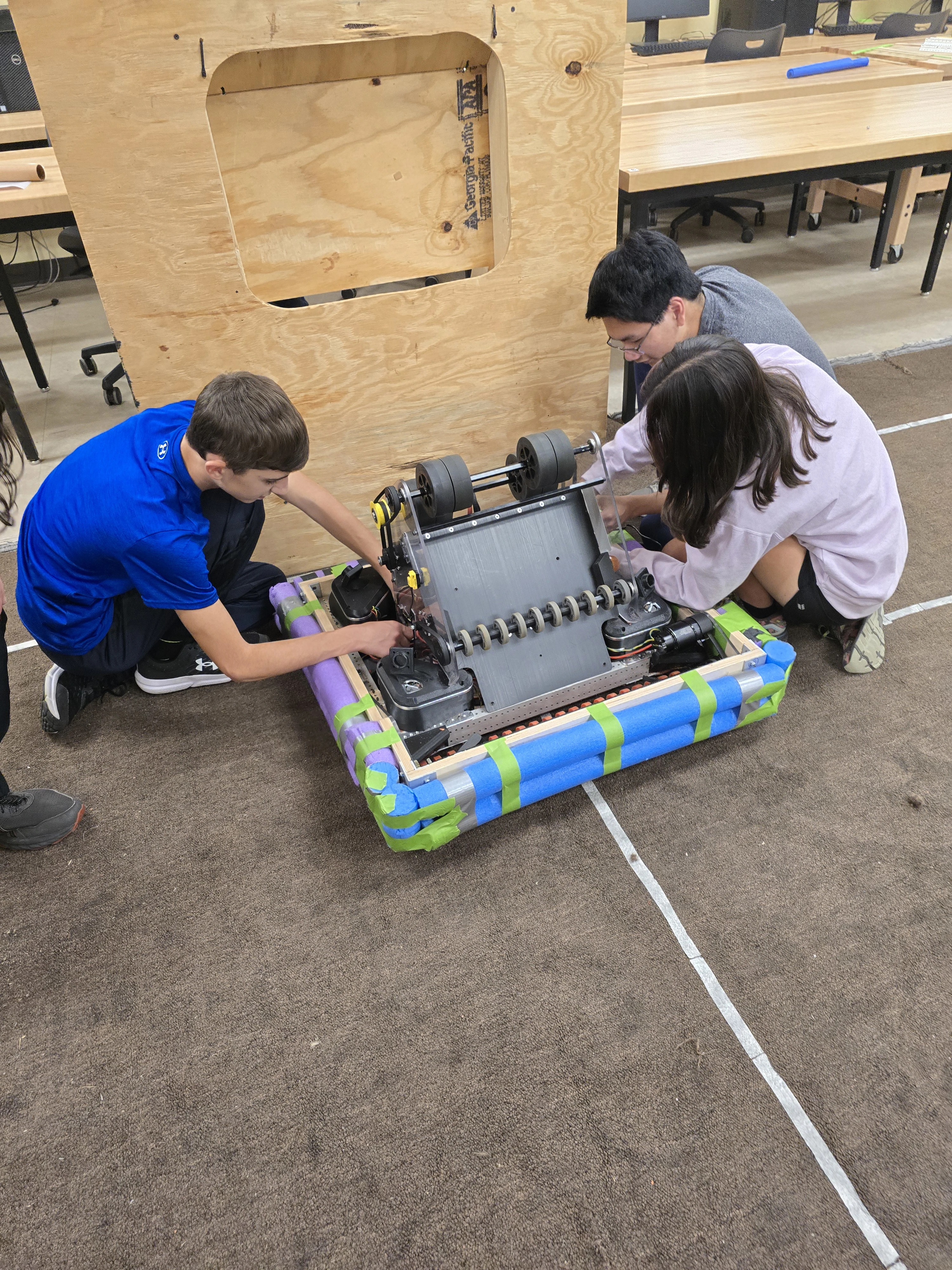
The students are assembling a rotating shaft that is used for the intake on the robot of the soft rings shot at the targets. This is one of many sub-assemblies that will be integrated onto the robot chassis.

We have the use of a large classroom with tables, chairs, and computers that are shown in the previous photos. Adjacent to the classroom is a work shop with machines, tools, and workbenches to work with wood and metal. In addition to the standard wood and metal working machines we purchased and installed two Haas router and lathe machines. They are on the left side of the picture.

The students are building the bumper that attaches to the base of the robot. A wooden structure is built that attaches to the robot frame. On the wooden structure plastic noodles (the kind used in swimming pools) are attached to the wooden structure that provides shock absorption. The bumpers are then covered in a very strong tear resistant fabric. The robots weigh up to 125 lbs and can travel up to 13 mph. In a match there are six robots on the field crashing into each other as they whiz around attempting to score points. The bumpers absorb the impacts and minimize the shocks that can cause significant damage.

The CNC routing machine is being set up to make parts for the robot. This will be the first production part made that will be used in the competition robot.

The router turned this chunk of metal …

… into this finished part.

The students are assembling the base of the robot. The base houses the computer, electronics, the motors that drive the robot, and the wiring the ties it all together. The wheels on the front are part of the ring intake mechanism. The robot drives to the ring and the intake mechanism sucks up the ring to the shooter (which is yet to be attached).
With the robot base and intake mechanism assembled we began testing the intake mechanism. The robot drives up to flexible orange rings on the floor and the intake mechanism loads the ring into the shooting mechanism (not yet installed).

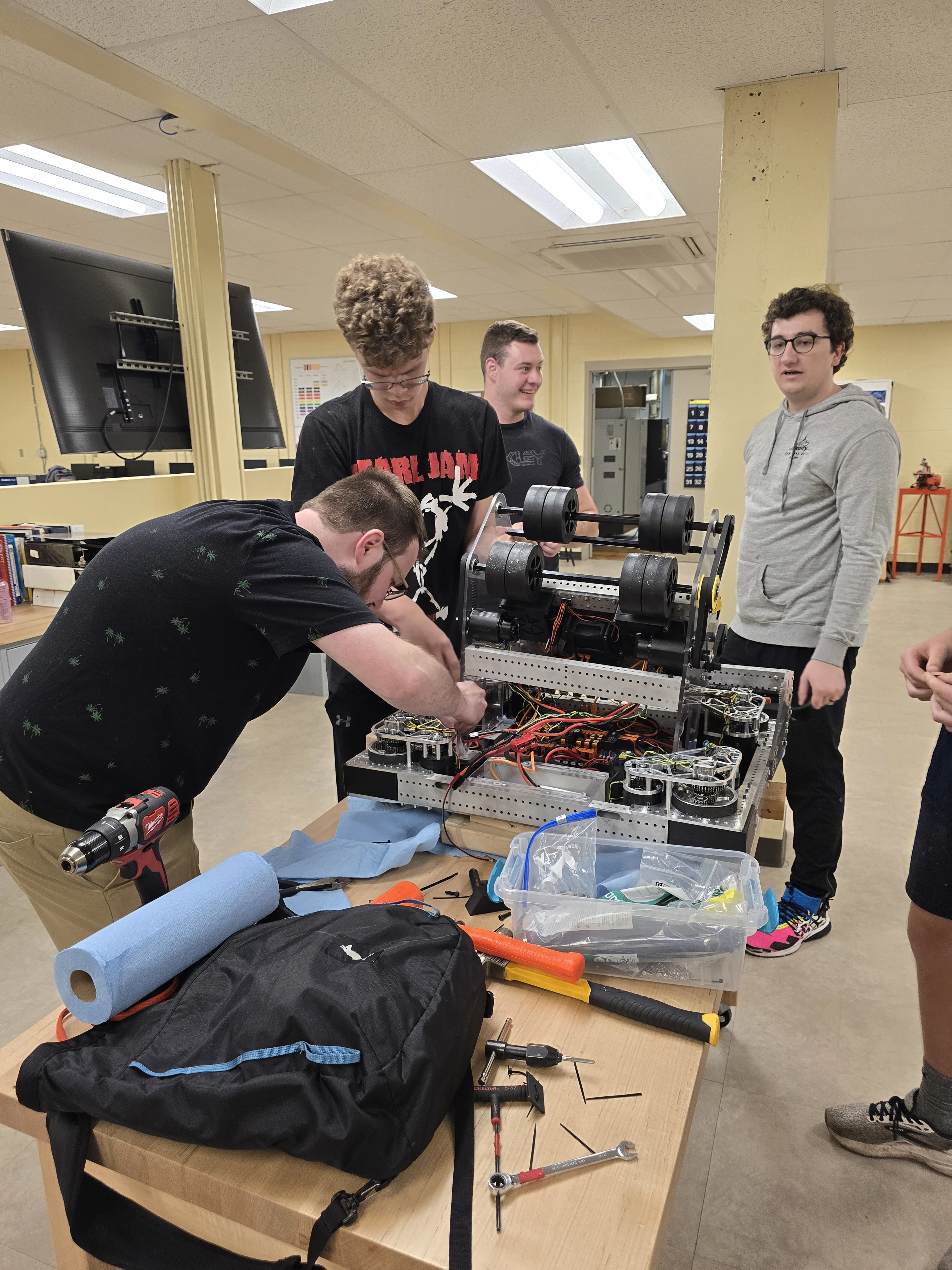
In this photo the Team is installing the shooting mechanism (shooter) and wiring up the motors to the electronics that controls the speed of the multiple motors that make up the shooter.
The students are doing the adjustments to the completed assembly of the robot. Here the students are making adjustments to the intake mechanism that feeds the shooting mechanism.

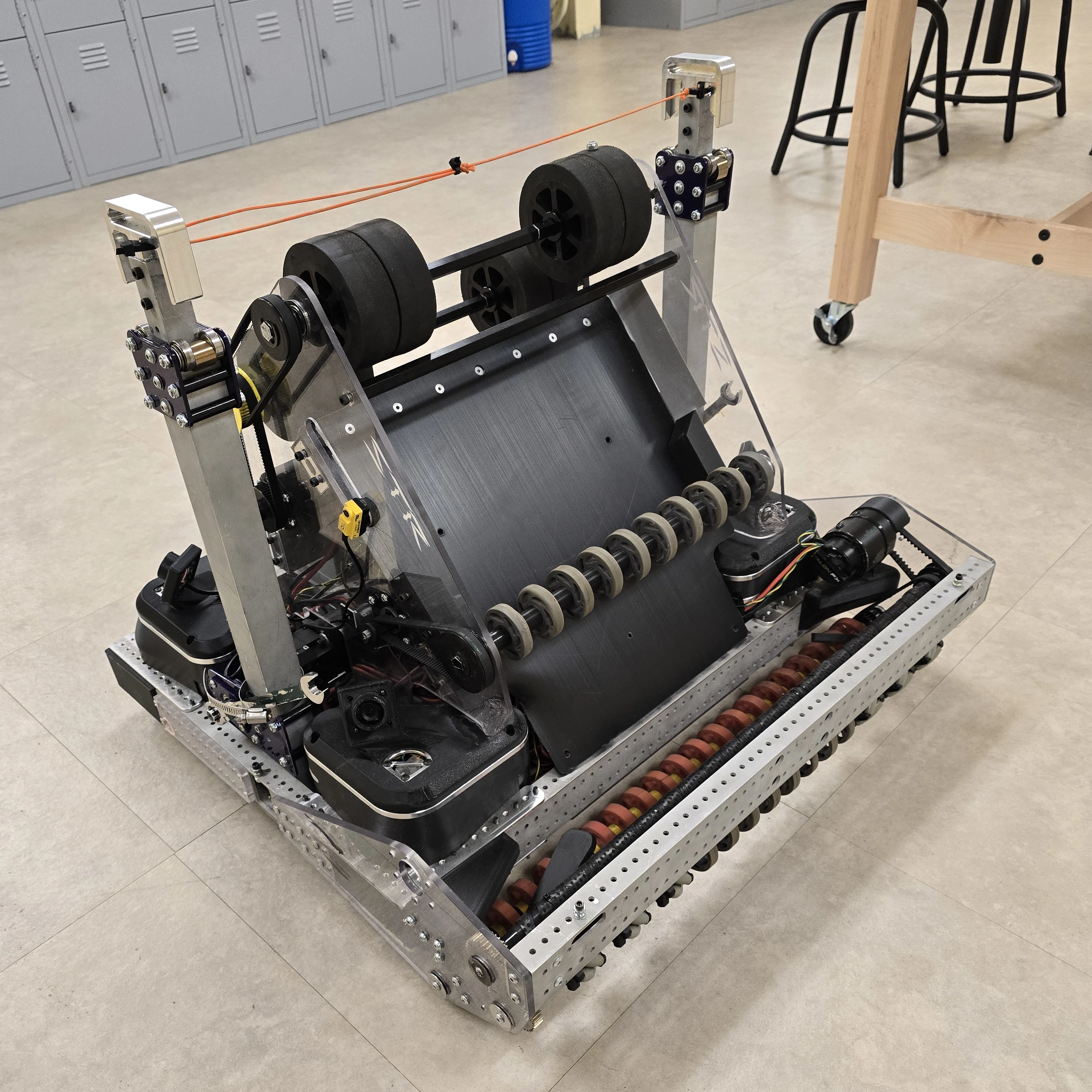
Here is the complete robot. The intake mechanism at the front of the robot rolls over to flexible rings on the floor. The rotating shaft sucks up and loads the ring into the shooting mechanism which is the flat black plate.
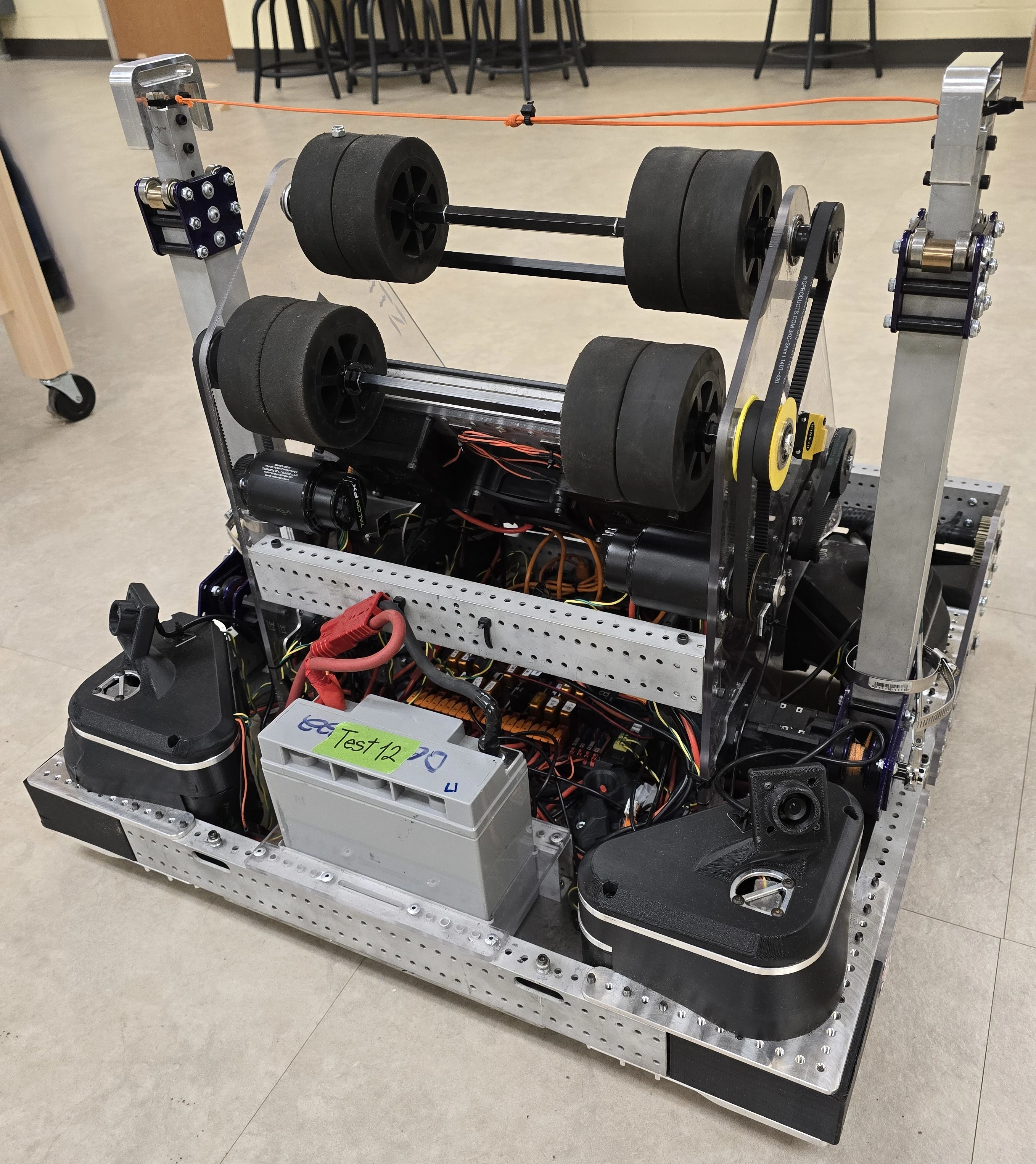
The view of the other side of the robot. You can see some of the electronics and wiring that is underneath the shooting mechanism. The grey box is the battery. The triangular mechanisms at the corner of the base are swerve drives that contain the robot wheels that can drive the robot up to 13 mph and quickly rotate to maneuver around the competition field.
During a match the robot is required to perform three main tasks during to score points. The robot has to shoot a ring into a “Speaker”, deliver a ring to an “Amp”, and climb onto a “Stage”.
The robot is shooting a ring into a mockup of the Speaker that is the target. The orange ring flies into the gap near the top of the Speaker to score points. The speed and angle of the ring as it flies to the speaker is controlled by varying the speed of a pair of rollers that propel the ring to the Speaker.

The students are making more adjustments to the robot prior to testing the robot at the Amplifier target.
The robot gently shoots the orange ring so that it falls into gap in the Amplifier target.

The robot is now ready for the Rochester and Albany competitions!